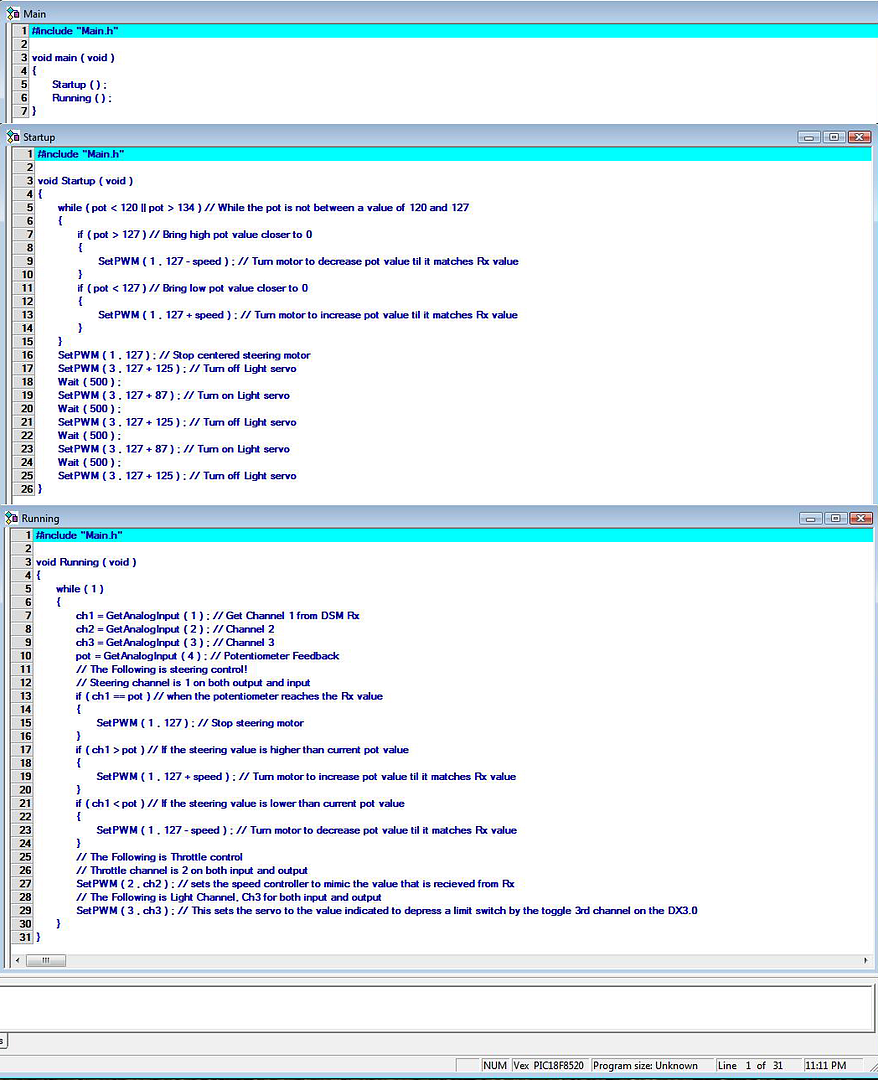
The final setup will have a vex robot controller in it. I will have my DSM Rx plug into the controller, and the controller will interpret the signals, and give me throttle and lights exactly as i had it, but also let me code for an auto-returning steering control, just like an actual RC will have, but with a powerful motor in there with a 10K ohm potentiometer on the output. I wrote up a version one of the code, that I will test once I get the controller.